Twin Delayed Deep Deterministic (TD3)¶
Paper |
Addressing Function Approximation Error in Actor-Critic Methods [1] |
|
Framework(s) |

|

|
API Reference |
||
Code |
||
Examples |
||
Benchmarks |
||
Twin Delayed Deep Deterministic (TD3) is an alogrithm motivated by Double Q-learning and built by taking the minimum value between two critic networks to prevent the overestimation of the value function. Garage’s implementation is based on the paper’s approach, which includes clipped Double Q-learning, delayed update of target and policy networks as well as target policy smoothing.
Default Parameters¶
target_update_tau=0.01,
policy_lr=1e-4,
qf_lr=1e-3,
discount=0.99,
exploration_policy_sigma=0.2,
exploration_policy_clip=0.5,
actor_update_period=2,
Benchmarks¶
PyTorch benchmark results¶
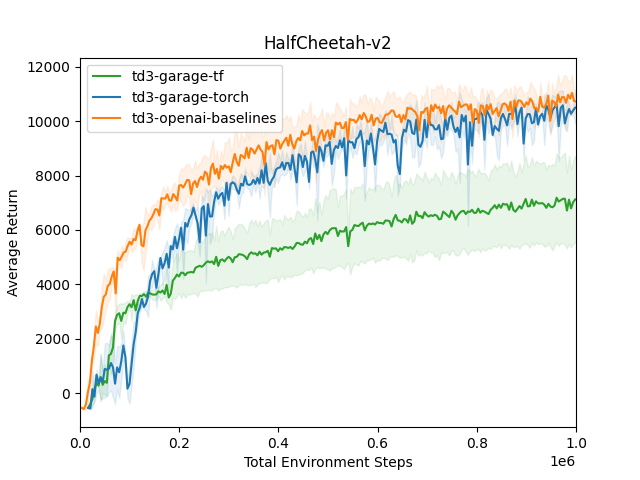 TD3 Torch HalfCheetah-v2
TD3 Torch HalfCheetah-v2 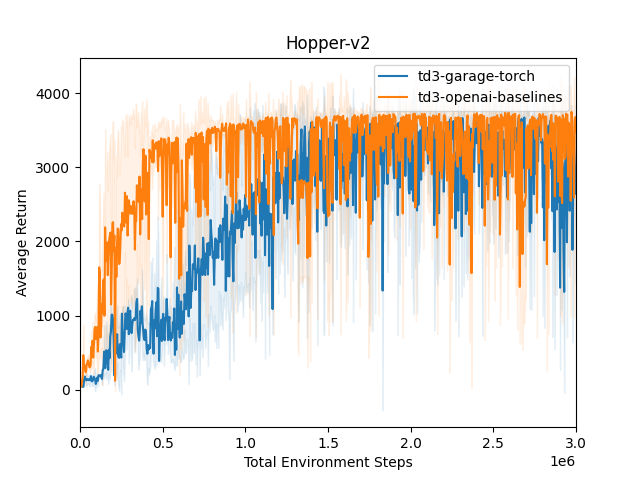 TD3 Torch Hopper-v2
TD3 Torch Hopper-v2
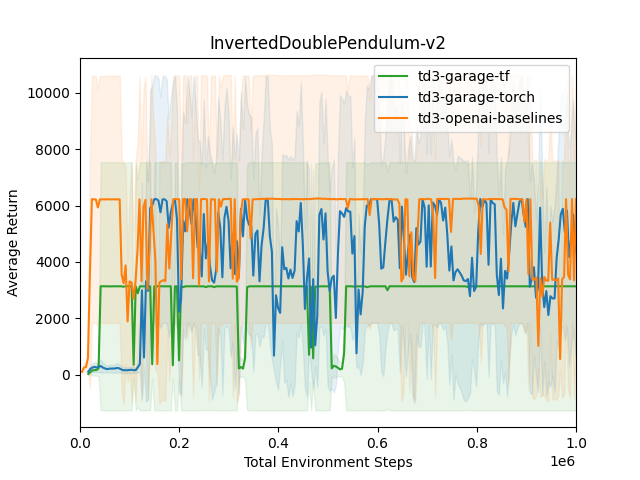 TD3 Torch InvertedDoublePendulum-v2
TD3 Torch InvertedDoublePendulum-v2  TD3 Torch InvertedPendulum-v2
TD3 Torch InvertedPendulum-v2
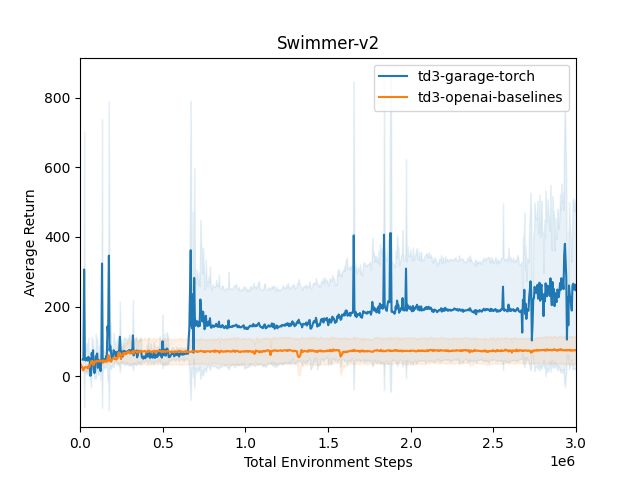 TD3 Torch Swimmer-v2
TD3 Torch Swimmer-v2 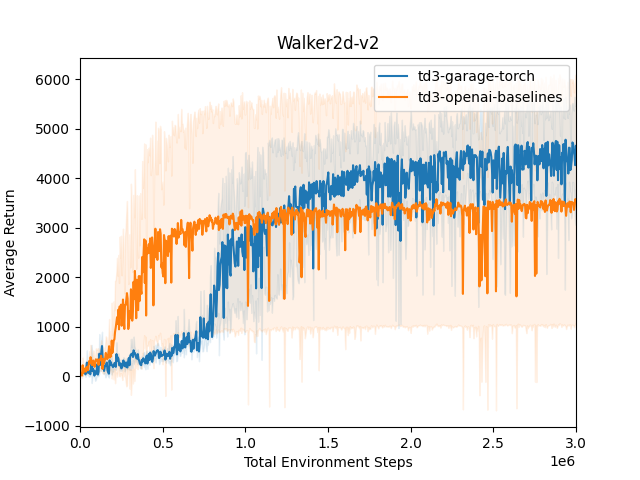 TD3 Torch Walker2d-v2
TD3 Torch Walker2d-v2
Tensorflow benchmark results¶
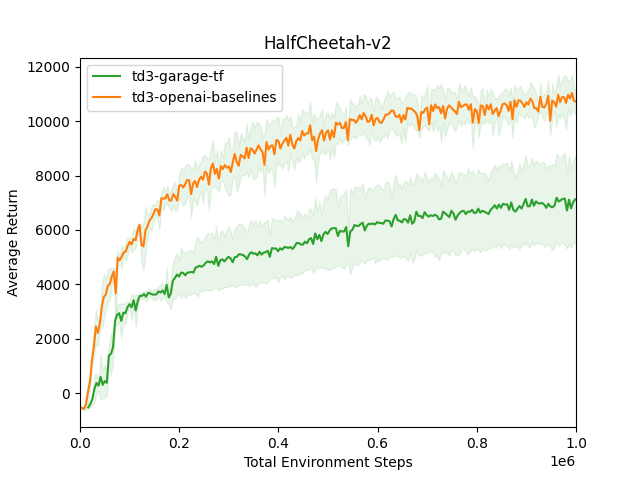 TD3 TF HalfCheetah-v2
TD3 TF HalfCheetah-v2 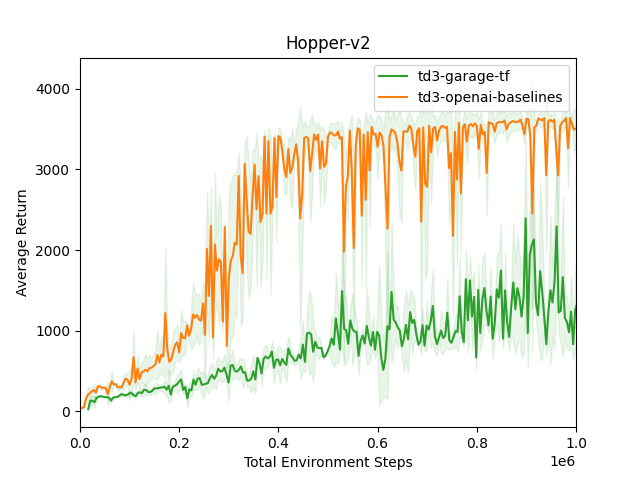 TD3 TF Hopper-v2
TD3 TF Hopper-v2
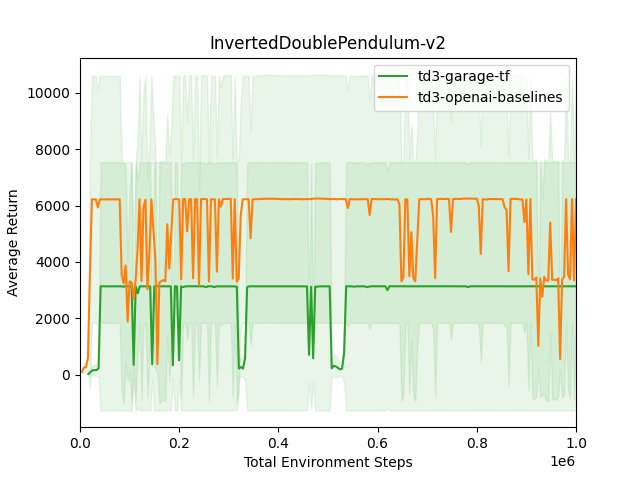 TD3 TF InvertedDoublePendulum-v2
TD3 TF InvertedDoublePendulum-v2 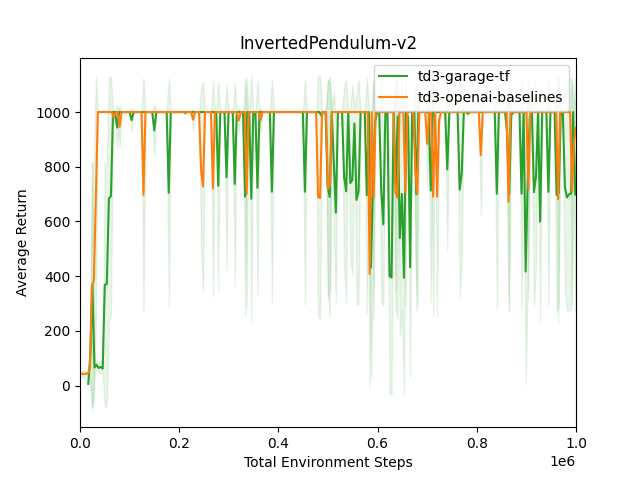 TD3 TF InvertedPendulum-v2
TD3 TF InvertedPendulum-v2
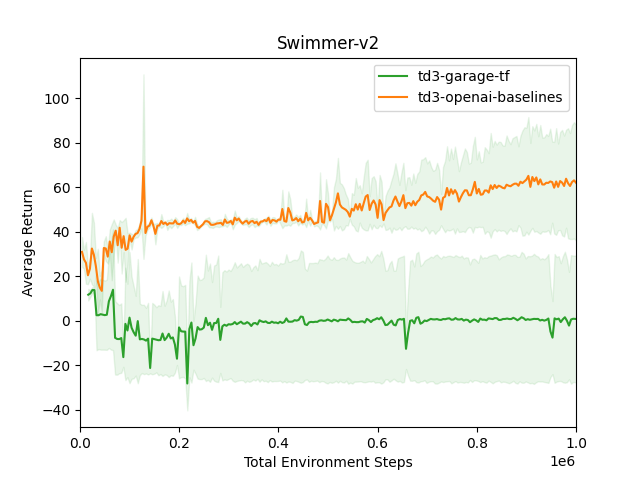 TD3 TF Swimmer-v2
TD3 TF Swimmer-v2
td3_garage_tf¶
"""A regression test for automatic benchmarking garage-TensorFlow-TD3."""
import tensorflow as tf
from garage import wrap_experiment
from garage.envs import GymEnv, normalize
from garage.experiment import deterministic
from garage.np.exploration_policies import AddGaussianNoise
from garage.replay_buffer import PathBuffer
from garage.sampler import FragmentWorker, LocalSampler
from garage.tf.algos import TD3
from garage.tf.policies import ContinuousMLPPolicy
from garage.tf.q_functions import ContinuousMLPQFunction
from garage.trainer import TFTrainer
hyper_parameters = {
'policy_lr': 1e-3,
'qf_lr': 1e-3,
'policy_hidden_sizes': [256, 256],
'qf_hidden_sizes': [256, 256],
'n_epochs': 250,
'steps_per_epoch': 40,
'n_exploration_steps': 100,
'n_train_steps': 50,
'discount': 0.99,
'tau': 0.005,
'replay_buffer_size': int(1e6),
'sigma': 0.1,
'buffer_batch_size': 100,
'min_buffer_size': int(1e4)
}
@wrap_experiment
def td3_garage_tf(ctxt, env_id, seed):
"""Create garage TensorFlow TD3 model and training.
Args:
ctxt (ExperimentContext): The experiment configuration used by
:class:`~Trainer` to create the :class:`~Snapshotter`.
env_id (str): Environment id of the task.
seed (int): Random positive integer for the trial.
"""
deterministic.set_seed(seed)
with TFTrainer(ctxt) as trainer:
num_timesteps = (hyper_parameters['n_epochs'] *
hyper_parameters['steps_per_epoch'] *
hyper_parameters['n_exploration_steps'])
env = normalize(GymEnv(env_id))
policy = ContinuousMLPPolicy(
env_spec=env.spec,
hidden_sizes=hyper_parameters['policy_hidden_sizes'],
hidden_nonlinearity=tf.nn.relu,
output_nonlinearity=tf.nn.tanh)
exploration_policy = AddGaussianNoise(
env.spec,
policy,
total_timesteps=num_timesteps,
max_sigma=hyper_parameters['sigma'],
min_sigma=hyper_parameters['sigma'])
qf = ContinuousMLPQFunction(
name='ContinuousMLPQFunction',
env_spec=env.spec,
hidden_sizes=hyper_parameters['qf_hidden_sizes'],
action_merge_layer=0,
hidden_nonlinearity=tf.nn.relu)
qf2 = ContinuousMLPQFunction(
name='ContinuousMLPQFunction2',
env_spec=env.spec,
hidden_sizes=hyper_parameters['qf_hidden_sizes'],
action_merge_layer=0,
hidden_nonlinearity=tf.nn.relu)
replay_buffer = PathBuffer(
capacity_in_transitions=hyper_parameters['replay_buffer_size'])
sampler = LocalSampler(agents=exploration_policy,
envs=env,
max_episode_length=env.spec.max_episode_length,
is_tf_worker=True,
worker_class=FragmentWorker)
td3 = TD3(env.spec,
policy=policy,
qf=qf,
qf2=qf2,
replay_buffer=replay_buffer,
sampler=sampler,
steps_per_epoch=hyper_parameters['steps_per_epoch'],
policy_lr=hyper_parameters['policy_lr'],
qf_lr=hyper_parameters['qf_lr'],
target_update_tau=hyper_parameters['tau'],
n_train_steps=hyper_parameters['n_train_steps'],
discount=hyper_parameters['discount'],
min_buffer_size=hyper_parameters['min_buffer_size'],
buffer_batch_size=hyper_parameters['buffer_batch_size'],
exploration_policy=exploration_policy,
policy_optimizer=tf.compat.v1.train.AdamOptimizer,
qf_optimizer=tf.compat.v1.train.AdamOptimizer)
trainer.setup(td3, env)
trainer.train(n_epochs=hyper_parameters['n_epochs'],
batch_size=hyper_parameters['n_exploration_steps'])
td3_garage_pytorch¶
"""A regression test for automatic benchmarking garage-Pytorch-TD3."""
import torch
from torch.nn import functional as F
from garage import wrap_experiment
from garage.envs import GymEnv, normalize
from garage.experiment import deterministic
from garage.np.exploration_policies import AddGaussianNoise
from garage.np.policies import UniformRandomPolicy
from garage.replay_buffer import PathBuffer
from garage.sampler import FragmentWorker, LocalSampler
from garage.torch import prefer_gpu
from garage.torch.algos import TD3
from garage.torch.policies import DeterministicMLPPolicy
from garage.torch.q_functions import ContinuousMLPQFunction
from garage.trainer import Trainer
hyper_parameters = {
'policy_lr': 1e-3,
'qf_lr': 1e-3,
'policy_hidden_sizes': [256, 256],
'qf_hidden_sizes': [256, 256],
'n_epochs': 250,
'steps_per_epoch': 40,
'batch_size': 100,
'start_steps': 1000,
'update_after': 1000,
'grad_steps_per_env_step': 50,
'discount': 0.99,
'target_update_tau': 0.005,
'replay_buffer_size': int(1e6),
'sigma': 0.1,
'policy_noise': 0.2,
'policy_noise_clip': 0.5,
'buffer_batch_size': 100,
'min_buffer_size': int(1e4),
}
@wrap_experiment(snapshot_mode='last')
def td3_garage_pytorch(ctxt, env_id, seed):
"""Create garage TensorFlow TD3 model and training.
Args:
ctxt (garage.experiment.ExperimentContext): The experiment
configuration used by Localtrainer to create the
snapshotter.
env_id (str): Environment id of the task.
seed (int): Random positive integer for the trial.
"""
deterministic.set_seed(seed)
trainer = Trainer(ctxt)
num_timesteps = hyper_parameters['n_epochs'] * hyper_parameters[
'steps_per_epoch'] * hyper_parameters['batch_size']
env = normalize(GymEnv(env_id))
policy = DeterministicMLPPolicy(
env_spec=env.spec,
hidden_sizes=hyper_parameters['policy_hidden_sizes'],
hidden_nonlinearity=F.relu,
output_nonlinearity=torch.tanh)
exploration_policy = AddGaussianNoise(env.spec,
policy,
total_timesteps=num_timesteps,
max_sigma=hyper_parameters['sigma'],
min_sigma=hyper_parameters['sigma'])
uniform_random_policy = UniformRandomPolicy(env.spec)
qf1 = ContinuousMLPQFunction(
env_spec=env.spec,
hidden_sizes=hyper_parameters['qf_hidden_sizes'],
hidden_nonlinearity=F.relu)
qf2 = ContinuousMLPQFunction(
env_spec=env.spec,
hidden_sizes=hyper_parameters['qf_hidden_sizes'],
hidden_nonlinearity=F.relu)
replay_buffer = PathBuffer(
capacity_in_transitions=hyper_parameters['replay_buffer_size'])
sampler = LocalSampler(agents=exploration_policy,
envs=env,
max_episode_length=env.spec.max_episode_length,
worker_class=FragmentWorker)
td3 = TD3(
env_spec=env.spec,
policy=policy,
qf1=qf1,
qf2=qf2,
sampler=sampler,
exploration_policy=exploration_policy,
uniform_random_policy=uniform_random_policy,
replay_buffer=replay_buffer,
steps_per_epoch=hyper_parameters['steps_per_epoch'],
policy_lr=hyper_parameters['policy_lr'],
qf_lr=hyper_parameters['qf_lr'],
target_update_tau=hyper_parameters['target_update_tau'],
discount=hyper_parameters['discount'],
grad_steps_per_env_step=hyper_parameters['grad_steps_per_env_step'],
start_steps=hyper_parameters['start_steps'],
min_buffer_size=hyper_parameters['min_buffer_size'],
buffer_batch_size=hyper_parameters['buffer_batch_size'],
policy_optimizer=torch.optim.Adam,
qf_optimizer=torch.optim.Adam,
policy_noise_clip=hyper_parameters['policy_noise_clip'],
policy_noise=hyper_parameters['policy_noise'])
prefer_gpu()
td3.to()
trainer.setup(td3, env)
trainer.train(n_epochs=hyper_parameters['n_epochs'],
batch_size=hyper_parameters['batch_size'])
References¶
- 1
Scott Fujimoto, Herke van Hoof, and David Meger. Addressing function approximation error in actor-critic methods. ArXiv, 2018. URL: https://arxiv.org/abs/1802.09477.
This page was authored by Iris Liu (@irisliucy).